
Join our community to see how developers are using Workik AI everyday.
Features Of Lua Generator

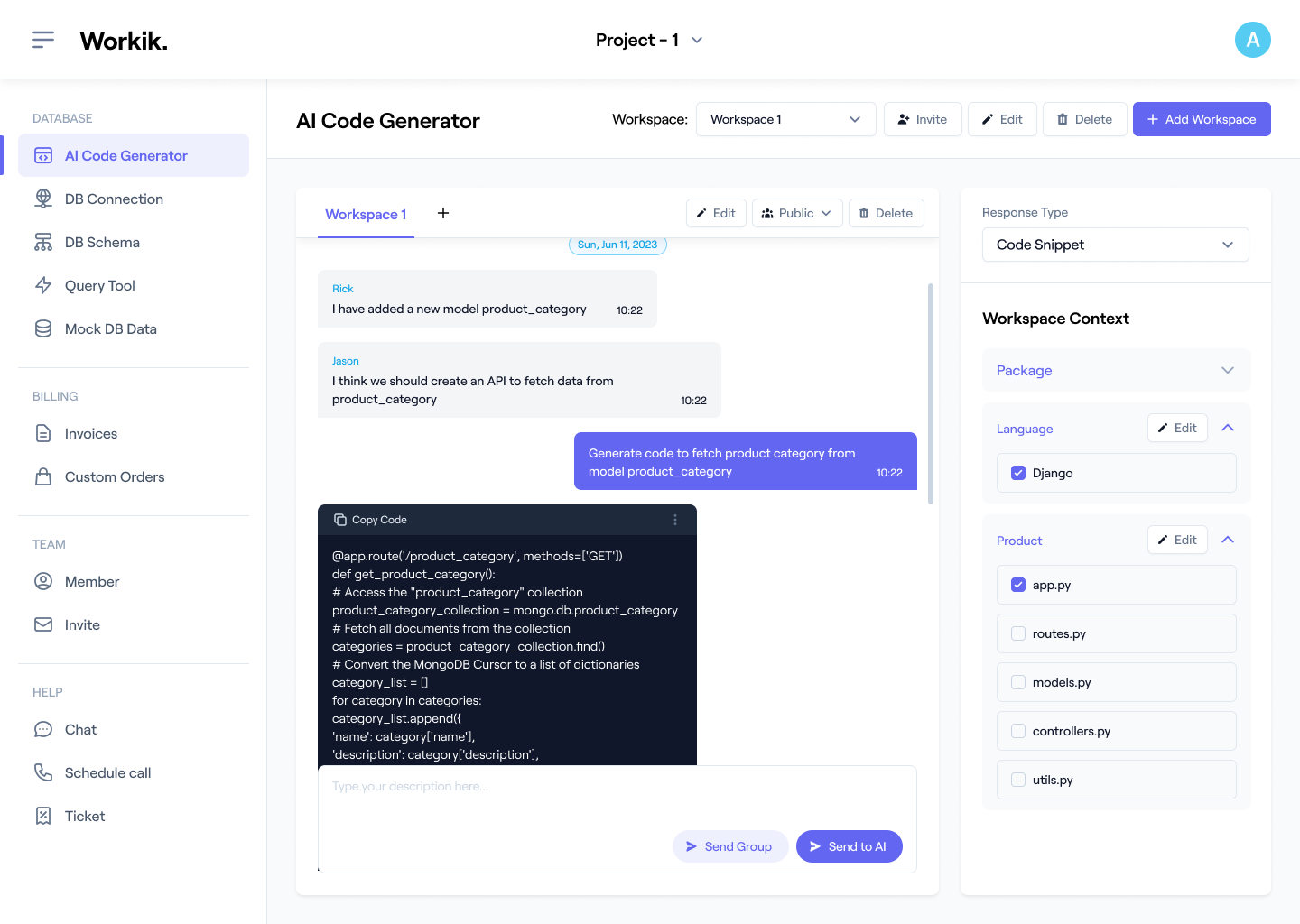
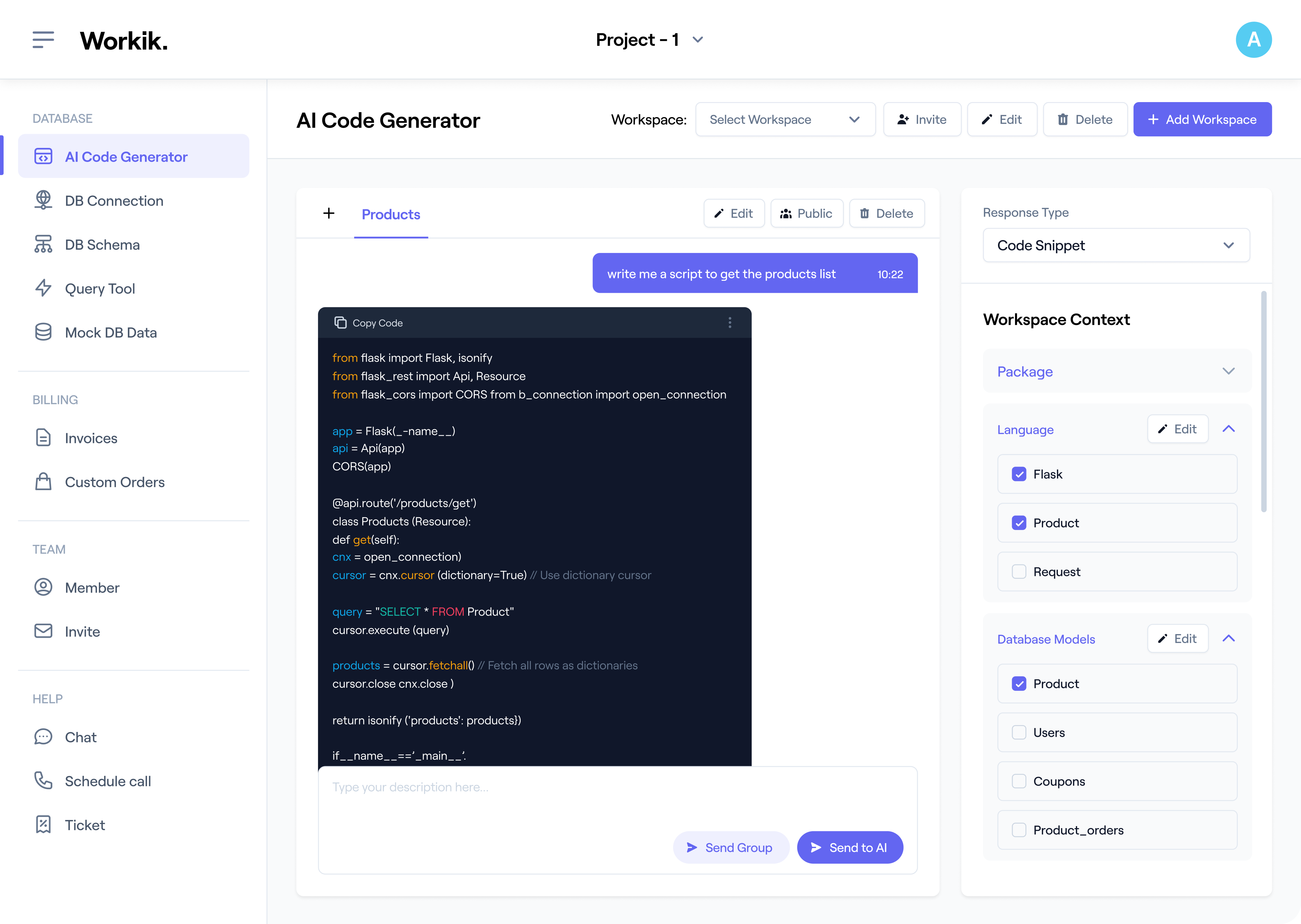
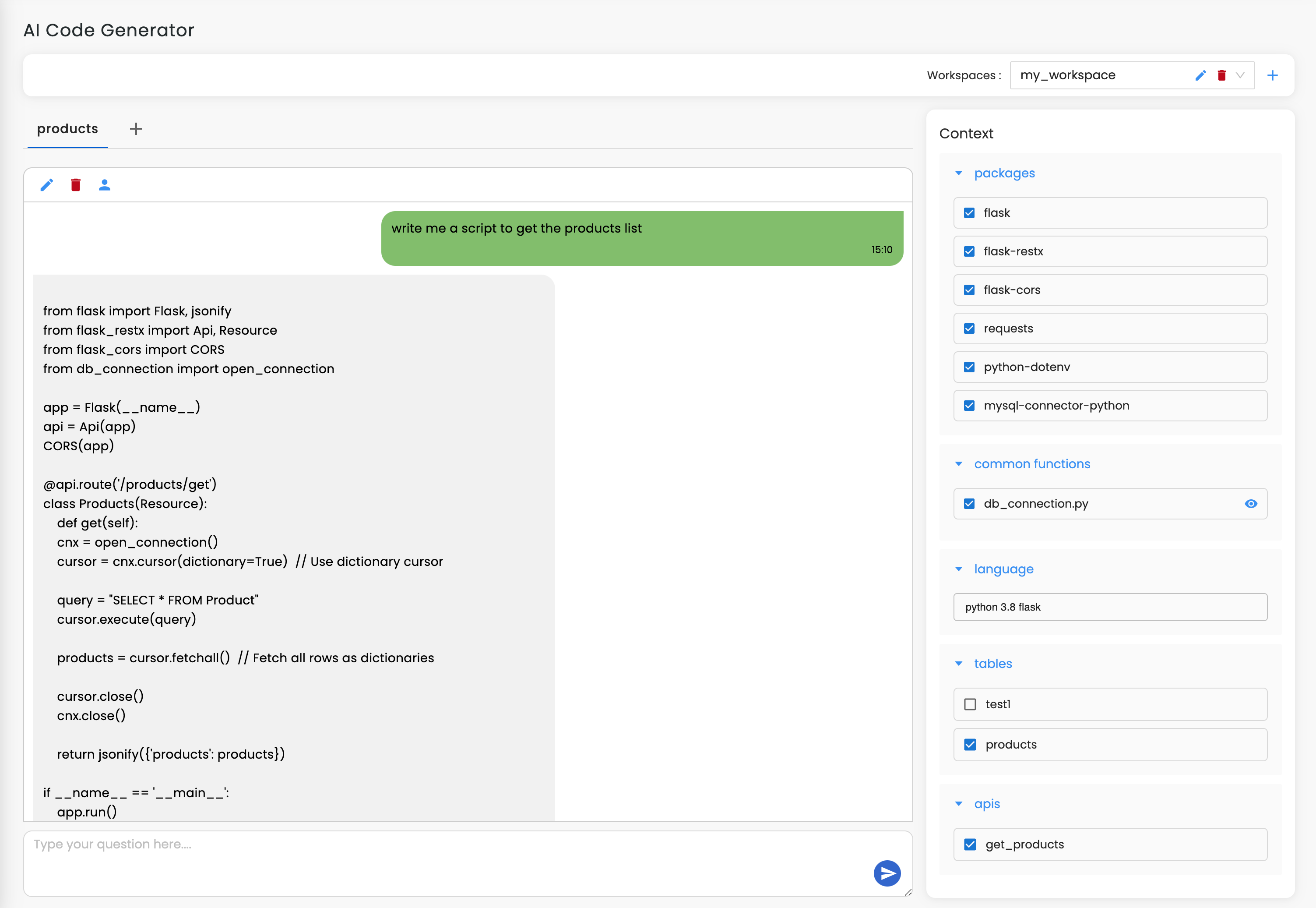
Instant Lua Code Generation
Workik’s AI adapts to your project’s context, generating functional code ready for deployment.

AI-Powered Debugging & Optimization
Whether optimizing Garry’s Mod scripts or improving frame rates in TIC-80, AI ensures your Lua code runs efficiently.
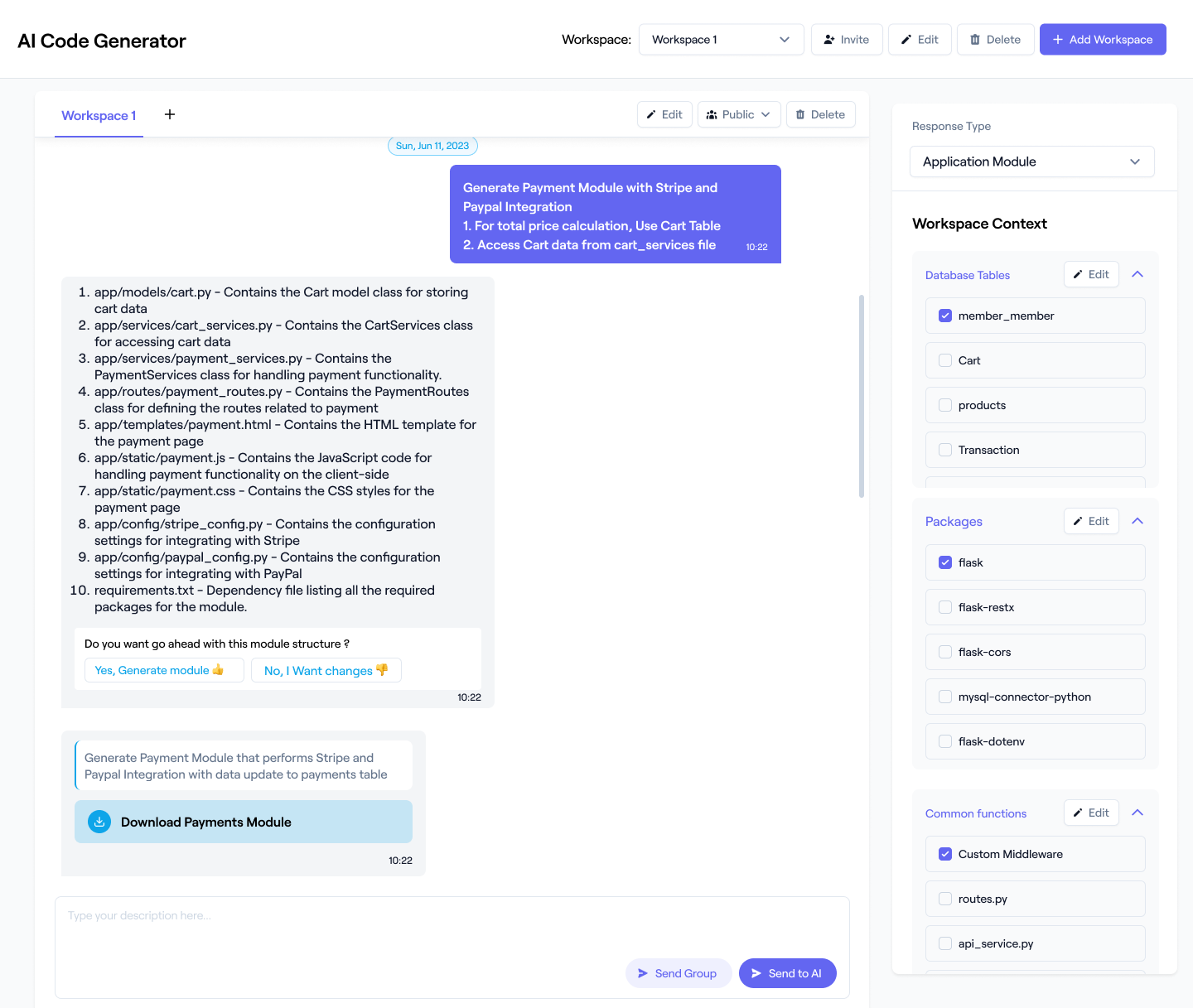
Seamless API Integration
Whether you're using OpenResty or NodeMCU, AI ensures smooth integration into your project.
Cross-Platform Scripting
Generate Lua scripts compatible with Windows, macOS, and Linux, ensuring cross-platform efficiency.
TESTIMONIALS
Real Stories, Real Results with Workik

Workik nailed my API integrations with Lapis. AI-generated Lua scripts saved me hours!

Alexa Morgan
Web Developer
Workik’s Lua generator made building my Love2D game a breeze! Fast, clean code – no hassle!

Samantha Lee
Junior Game Developer
Debugging Lua scripts in Defold was tough – until Workik’s AI optimized everything fast!

Chris Dawson
Lead Engineer
Try Lua Generator For Free
if(GPIO_Pin == GPIO_PIN_0) // button pressed
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); HAL_Delay(500); // milliseconds
CC = arm-none-eabi-gcc CFLAGS = -mcpu=cortex-m3 -mthumb -Os -ffunction-sections -fdata-sections LDFLAGS = -Wl,--gc-sections -T STM32F103C8Tx_FLASH.ld SRCS = main.c system_stm32f1xx.c OBJS = $(SRCS:.c=.o) all: firmware.elf firmware.elf: $(OBJS) $(CC) $(CFLAGS) $(LDFLAGS) -o $@ $^ flash: firmware.elf openocd -f interface/stlink.cfg -f target/stm32f1x.cfg -c "program $< verify reset exit" Paper completed – suitable for undergraduate embedded systems coursework or professional reference.
UART_HandleTypeDef huart2; huart2.Instance = USART2; huart2.Init.BaudRate = 115200; huart2.Init.WordLength = UART_WORDLENGTH_8B; huart2.Init.StopBits = UART_STOPBITS_1; huart2.Init.Parity = UART_PARITY_NONE; huart2.Init.Mode = UART_MODE_TX_RX; HAL_UART_Init(&huart2); char msg[] = "Hello STM32\r\n"; HAL_UART_Transmit(&huart2, (uint8_t*)msg, strlen(msg), HAL_MAX_DELAY); The Nested Vectored Interrupt Controller (NVIC) handles prioritized interrupts.
while (1)
TIM_HandleTypeDef htim2; htim2.Instance = TIM2; htim2.Init.Prescaler = 7200-1; // 72 MHz / 7200 = 10 kHz htim2.Init.Period = 1000-1; // 10 Hz PWM HAL_TIM_PWM_Init(&htim2); TIM_OC_InitTypeDef sConfigOC = 0; sConfigOC.OCMode = TIM_OCMODE_PWM1; sConfigOC.Pulse = 500; // 50% duty cycle HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1); HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1); Configure UART2 (PA2=TX, PA3=RX) at 115200 baud:
Abstract The STM32 family of 32-bit ARM Cortex-M microcontrollers from STMicroelectronics has become a dominant platform in embedded systems due to its performance, power efficiency, and extensive peripheral set. This paper provides a complete overview of programming STM32 devices, covering development environments, hardware abstraction layers, low-level register programming, and practical examples. We compare major toolchains (STM32CubeIDE, Keil MDK, IAR EWARM), explain the role of the Hardware Abstraction Layer (HAL) and Low-Layer (LL) APIs, and demonstrate basic peripheral control (GPIO, timers, USART). The paper concludes with best practices for debugging and optimization.
GPIO_InitTypeDef GPIO_InitStruct = 0; GPIO_InitStruct.Pin = GPIO_PIN_13; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
| Method | Cycles per toggle | Code size (bytes) | |----------------------|------------------|--------------------| | HAL_TogglePin | 36 | 52 | | LL_GPIO_TogglePin | 8 | 12 | | Direct register (BSRR)| 4 | 8 |
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
HAL_Init(); SystemClock_Config(); // generated by CubeMX __HAL_RCC_GPIOC_CLK_ENABLE();
Explore more on Workik







